ESP32 Arduino Setup
[work in progress]
Arduino IDE setup for ESP32
This guide walks you through setting up the Arduino IDE for use with ESP32 devkit v1 module as well as installation of the libraries we most use during H&D workshops. The instructions are for Arduino IDE version 1.x, but should mostly make sense for version 2.x as well.
Installation
Download IDE
First, download the Arduino IDE.
- Download the Arduino software here: Arduino Download.
Pick the installer appropriate for your system.
If necessary you can follow one of these guides:
Install ESP32 Boards
Next we need to install an extension that makes it possible to program the ESP32 modules from the Arduino IDE.
Arduino IDE settings Open the Arduino Setting by going to: - Windows/Linux: Menu > File > Preferences... - MacOS: Menu > Arduino > Preferences...
- Copy and paste the following into ‘Additional Boards Manager URLs’ and click ‘Ok’.
https://dl.espressif.com/dl/package_esp32_index.json

Optional:
- Change the compilation and upload process display mode to ‘verbose mode’
- Check ‘compile’ and ‘upload’ in ‘Show verbose output during:’
Launch the Board Manager Go to the menu Tools > Boards > Board manager...


Type ‘esp32’ in the search box and click ‘Install’

Install drivers
For your computer to be able to communicate with the ESP32 board you need device drivers. If you have already installed the SiLabs driver you can skip this step. If you're unsure, check the step Check if the USB driver are working below.
Installing a USB device driver to communicate with the ESP32 module (chip name: SiliconLabs CP2012)
Linux 3.x.x & 4.x.x
- Driver installation not required (included in kernel)
Linux 2.6.x
Linux 2.6.x - No information
Windows
Mac OS
- Check if you already have this driver installed by searching your machine for a file named “SiLabsUSBDriver.kext” AND/OR “SiLabsUSBDriverYos.kext” AND/OR “SiLabsUSBDriver64.kext”. On a Mac, they can be in either of these folders listed below, depending on your system. If you find nothing, proceed to install. Otherwise, uninstall using the uninstaller provided, before re-installing (drag the uninstall.sh file into a terminal window and hit enter to uninstall.
- /Library/Extensions/SiLabsUSBDriver.kext
- /Library/Extensions/SiLabsUSBDriverYos.kext
- /System/Library/Extensions/SiLabsUSBDriver64.kext
- /System/Library/Extensions/SiLabsUSBDriver.kext
- Download the driver: Silabs USB communication chip driver download
- Doubleclick “Install CP210x VCP Driver.app” to install it.
- When it gives a security message, follow the instructions to allow the install to continue
Check if the USB driver are working
- If you just installed the driver, restart your computer.
- For Mac OS users: after restarting, make sure GateKeeper does not interfere with driver loading.
- If you have problems, please check out this MacOS troubleshooting page.
- If communication is possible, you should be able to select the port under: Menu > Tools > Port > ...
The name of the port may vary depending on your operating system.
- On Windows it will probably called COM* where * is a number, ie. COM4.
- On linux it will be called /dev/ttyUSB* where * is a number, ie /dev/ttyUSB0
- On MacOS it will be called /dev/cu.SLAB_USBtoUART as shown in the picture below.
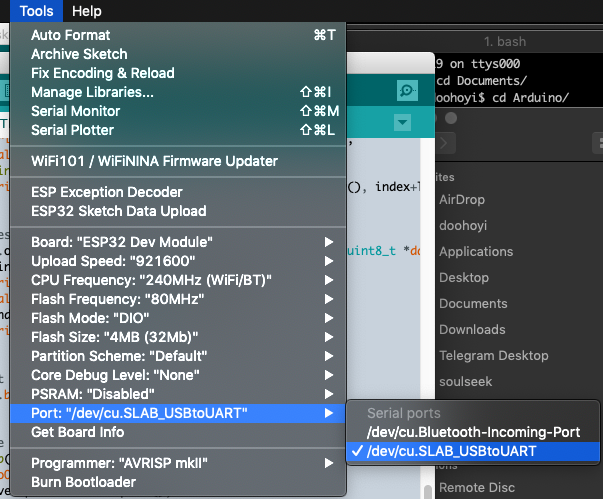 screenshot of Arduino window with menu Tools-Port-SLAB_USBtoUART selected
screenshot of Arduino window with menu Tools-Port-SLAB_USBtoUART selected

Install libraries
These are all optional depending on the workshop your following.
ESPAsyncWebServer
- Download the code
- Unzip the downloaded file.
- Remove the "-master" part from the unzipped directory name, so
ESPAsyncWebServer-mastershould now be calledESPAsyncWebServer - Move the renamed directory to your library directory:
- On Windows:
My Documents\Arduino\libraries - On Linux:
{sketchbook folder}/libraries. The sketchbook folder location can be found (or changed) at File > Preferences > Sketchbook location:. This is the location of libraries installed via Library Manager (Sketch > Include Library > Manage Libraries…) or Sketch > Include Library > Add .ZIP Library. You should also manually install libraries to that location. - On MacOS:
~/Documents/Arduino/libraries
AsyncTCP
Much the same as above:
- Download the code
- Unzip the downloaded file.
- Remove the "-master" part from the unzipped directory name, so
AsyncTCP-mastershould now be calledAsyncTCP - Move the renamed directory to your library directory (See above).
Restart the IDE after installation.
Confirming code compilation
- Restart the Arduino IDE (the Arduino software)
- Create a new sketch.
- Copy/paste the following code. This code does nothing, but if it compiles and upload without errors we know that everything is installed correctly.
#include <WiFi.h>
#include <AsyncTCP.h>
#include <ESPAsyncWebServer.h>
void setup() {
}
void loop() {
}
- Select the ESP32 Dev Module board

Compile
Click on the compile button in the top left of the editor (see red arrow in pic beneath)

- If the compilation process is successful, it will say “DONE COMPILING” at the bottom
- This means Arduino confirms it can find everything it needs to upload working code
- Don’t upload the code to the board yet, first we need some more stuff

- If the compilation process ends abnormally, it will give an orange error
- If necessary, troubleshoot using the error messages (if you don’t get any, check that “verbose” is checked in settings of Arduino.

Upload to the Board
- Click on the Upload button (arrow pointing right on top of the Arduino window), and then while the text ‘Connecting …’ displays in the control window at the bottom of the screen, press and hold the’ BOOT ’button on the ESP board for one second.

- If the upload was successful, you will see this screen:

- If the upload was unsuccessful, you will see this error

Troubleshooting tips for various problem factors here
Mac OS Monterey issue during upload
- If you’re using Mac OS Monterey, you might get an error like this in the Arduino output window:
” exec: “python”: executable file not found in $PATH error on mac monterey ” If that happens, open a Terminal window, and paste the code below to install the right version of Python in the right place. Then hit enter.
sed -i -e 's/=python /=python3 /g' ~/Library/Arduino15/packages/esp32/hardware/esp32/*/platform.txt
- Now restart the Arduino application and try uploading the code to the board again.
If everything went well, you are now ready to upload your own code to the board!
Optional additional steps
Adjust ESP32 Dev Module board settings
Changing the settings below will increase the speed with which your webpages will be uploaded to the board.
Look up the board settings under > Tools > Most of these settings are correct by default, you just have to change QIO to DIO
- Board: ESP32 Dev module
- Upload Speed : 921600
- CPU Frequency : 240MHz (WiFi BT)
- Flash Frequency : 80MHz
- Flash Mode : **DIO** (is QIO by default)
- Flash Size : 4MB (32Mb)
- Partition Scheme : Default
- Core Debug Level : None
- PSRAM : Disabled

Increasing the upload capacity of the board (at your own risk)
It is possible to increase the upload capacity of the board so you can make slightly bigger websites. This is documented by Doohoyi from Dianaband, but we haven’t tried it. Proceed at your own risk!
Dianaband’s workshop documentation
Acknowledgments
Is document is heavily based on the wonderful documentation of Dianaband: https://github.com/applecargo/WifiZineThrowie/blob/master/docs/index.md